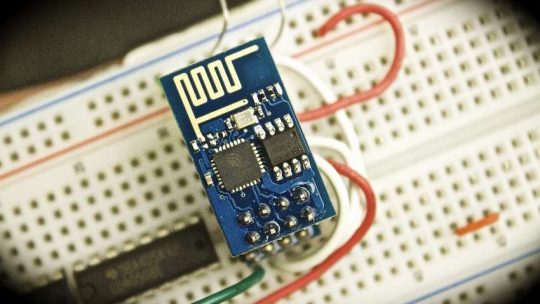
ESP8266 wifi modül kullanımı
29 Aralık 2016Son günlerde ağırlıklı olarak arduino platformunda IoT temelli geliştirmeler yapmaya çalışıyorum. Tasarlamaya çalıştığım yapı genel olarak düşük güç ile çalışan sıcaklık, nem… Okumaya devam et
Teknolojik
Projeler
Son günlerde ağırlıklı olarak arduino platformunda IoT temelli geliştirmeler yapmaya çalışıyorum. Tasarlamaya çalıştığım yapı genel olarak düşük güç ile çalışan sıcaklık, nem… Okumaya devam et

ÖZETÇE: WEB temelli uygulamalar için servislerinin çalışır durumda olup olmadığının (Erişilebilirlik – Availability) ve hatta çalışır durumda olan servislerin de ne… Okumaya devam et

Twitter kullanıcıları bilirler ki her bir tweet en fazla 140 karakter içerebilir. Eğer siz de sıkı bir Twitter kullanıcısıysanız mutlaka… Okumaya devam et
ÖZETÇE: Müşterilerin hizmetine sunulan IT ya da Network servisleri faklı nedenlerden (Firewall, Servis hataları, veritabanı hataları, vb.) dolayı zaman zaman erişilemez… Okumaya devam et


 “Bu web sitesinde görmüş olduğunuz bilgilerin, dokümanların ve diğer materyallerin kullanılmasından doğabilecek hiç bir sorumluluktan site sahibi sorumlu tutulamaz. Web sitesi içerisinde yer alan yazılar, yorumlar, resimler ve diğer tüm içerikler yalnızca sahibinin görüşünü yansıtmakta olup içeriğin sahibi kişilerin çalıştığı kurumları bağlayıcı hiç bir nitelik taşımamaktadır. Yapılan tüm alıntılar mutlaka kaynak gösterilerek verilmeye çalışılmaktadır. Web sitesi içerisinde bulunan ilgili materyaller, ilgili yasal kurumlar tarafından uygun görülmemesi durumda kaldırılacaktır.”
“Bu web sitesinde görmüş olduğunuz bilgilerin, dokümanların ve diğer materyallerin kullanılmasından doğabilecek hiç bir sorumluluktan site sahibi sorumlu tutulamaz. Web sitesi içerisinde yer alan yazılar, yorumlar, resimler ve diğer tüm içerikler yalnızca sahibinin görüşünü yansıtmakta olup içeriğin sahibi kişilerin çalıştığı kurumları bağlayıcı hiç bir nitelik taşımamaktadır. Yapılan tüm alıntılar mutlaka kaynak gösterilerek verilmeye çalışılmaktadır. Web sitesi içerisinde bulunan ilgili materyaller, ilgili yasal kurumlar tarafından uygun görülmemesi durumda kaldırılacaktır.”




Son Yorumlar